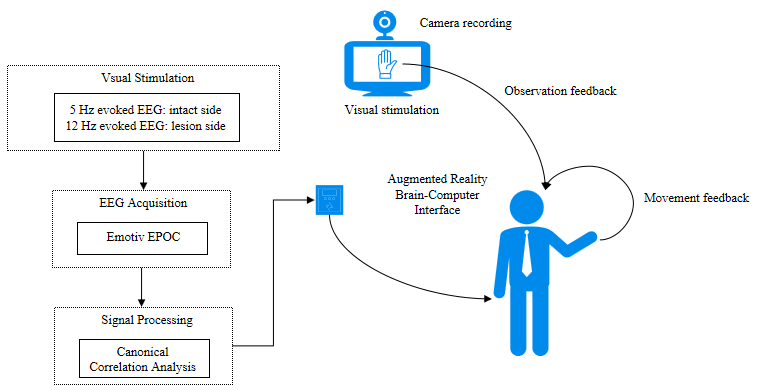
在機器人技術與神經科學交叉領域的最新突破中,微云全息宣布成功開發了一種創新的機械臂控制系統。該系統結合了增強現實(AR)、計算機視覺和穩態視覺誘發電位(SSVEP)-腦機接口(BCI),為用戶提供了一個直觀且高度集成的操作體驗。這項技術的開發標志著向實用化腦控機器人邁出了重要的一步。微云全息的研究團隊通過將最新的AR技術和腦機接口技術相融合,設計了一個集成的ARC-BCI控制系統(Augmented Reality Brain-Computer Interface),允許用戶通過腦電圖(EEG)信號控制機械臂。
該系統的核心是利用HoloLens提供的AR環境,它不僅呈現了機械臂的操作界面,還通過閃爍刺激激發用戶的SSVEP,從而減少了用戶在視覺刺激器和機械臂之間切換注意力的需要:
AR環境的定制與優化
環境定制:為特定應用場景定制AR環境,以確保用戶界面的直觀性和交互的自然性。
用戶適應性:通過機器學習算法,自動調整AR顯示以適應不同用戶的視角和操作習慣。
SSVEP-BCI的信號處理與特征提取
信號預處理:采用濾波和去噪技術,提高EEG信號的質量。
特征選擇:利用統計和機器學習方法,識別和提取與SSVEP相關的關鍵特征。
BCI與AR的同步機制
時間戳同步:確保BCI信號采集與AR環境刺激的精確同步。
反饋循環:建立一個反饋系統,將機械臂的狀態信息反饋到AR界面,供用戶調整下一步操作。
計算機視覺與物體識別
深度學習模型:訓練深度學習模型以提高物體識別的準確性和魯棒性。
實時物體追蹤:開發算法實時追蹤選定物體的位置和姿態變化。
機械臂的自動控制算法
運動規劃:實現一個高效的運動規劃算法,以快速響應用戶的BCI命令。
力覺反饋:集成力覺傳感器,提供反饋信號,增強操作的安全性和精確性。
系統集成測試與驗證
模塊測試:對AR、BCI、計算機視覺和機械臂控制各個模塊進行獨立測試。
系統驗證:通過模擬實際操作場景,驗證整個系統的性能和可靠性。
用戶交互界面(UI)設計
交互設計:設計簡潔直觀的UI,減少用戶的學習成本。
可訪問性:確保系統界面對不同能力和背景的用戶都是友好的。
數據記錄與分析
日志記錄:記錄操作過程中的關鍵數據,用于后續分析和系統優化。
性能監控:實時監控系統性能,快速定位并解決潛在問題。
安全性能增強
故障檢測:實現系統級的故障檢測機制,確保在出現問題時能夠及時響應。
權限管理:設置嚴格的用戶權限管理,防止未授權的操作。
微云全息的ARC-BCI系統能夠提供一個高度集成、用戶友好、安全可靠的腦控機械臂操作平臺,推動腦機接口技術在多個領域的應用。微云全息的這項技術不僅提升了腦控機器人的實用性,還為未來的人機交互界面設計提供了新的方向。隨著技術的不斷進步和優化,該系統有望在醫療、制造、服務業等多個領域發揮重要作用。
免責聲明:以上內容為本網站轉自其它媒體,相關信息僅為傳遞更多信息之目的,不代表本網觀點,亦不代表本網站贊同其觀點或證實其內容的真實性。如稿件版權單位或個人不想在本網發布,可與本網聯系,本網視情況可立即將其撤除。


